Innovative Robotic Skin: Enhancing Humanoid Interaction
Written on
Chapter 1: The Importance of Skin in Robotics
In the realm of robotics, it's easy to think of iconic characters like C-3PO from Star Wars as the epitome of humanoid design. However, this depiction overlooks a significant limitation: the lack of functional skin.

Human skin serves as the largest organ, playing vital roles that are often ignored in robotic design. It enables organisms to interact with their surroundings and regulates temperature through mechanisms like sweating—an essential adaptation that humans rely on today. Furthermore, skin acts as a protective barrier, preventing water loss and shielding against harmful substances and microorganisms. This complex structure not only provides resilience but also contributes to the overall strength of the body.
Section 1.1: Advantages of Artificial Skin for Robots
While human skin comprises multiple layers, many robotic applications treat it as merely decorative. Researchers at TU Munich are innovating artificial skin cells tailored for robots. This technology integrates a self-organizing network that forms a kinematic model for the robot, enabling it to perceive its environment through multi-modal sensor signals aimed at creating safer, more interactive robots capable of both contact and pre-contact detection.
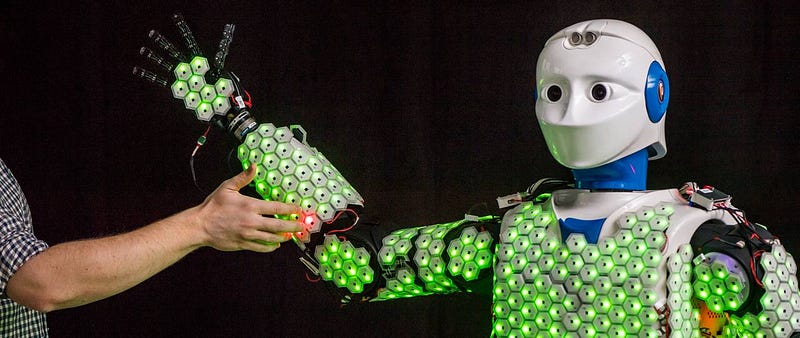
The H-1 robot, depicted in the image above, showcases 1260 cells outfitted with over 13,000 sensors. These cells measure a variety of stimuli, including:
- Vibrations (acceleration sensors)
- Pressure (capacitive force sensors)
- Pre-touch (proximity sensors)
- Temperature (temperature sensors)
Each cell’s microcontroller processes and filters the data, preparing it for further analysis. This innovative approach not only enhances the robot's ability to interact but also equips its feet with sensors to navigate uneven surfaces more adeptly, as highlighted in a recent TED Talk.
Section 1.2: The Quest for E-Skin Development
Scientists engaged in developing electronic skin (e-skin) have identified similar requirements for artificial skin. The strategic placement of sensors across various regions mimics the sensitivity zones found in human skin. These sensors need to be incorporated into flexible materials, while also ensuring rapid responsiveness and low energy consumption. However, powerful processing capabilities are essential for managing the extensive data generated by these systems.
Chapter 2: Overcoming Challenges in Robotic Sensation
One major hurdle faced by Gordon Cheng’s research team is managing the data overflow produced by the hexagonal skin cells. The multi-modal tactile feedback from over 1200 cells demands considerable communication bandwidth and processing power. Implementing various frameworks can streamline information flow, yet a robust network of cells remains critical for effective operation. Striking a balance between the advantages offered by these cells and the less critical areas remains a key challenge.
Conclusion: Towards More Sensible Robots
Since human skin consists of cells, it stands to reason that we should explore the application of skin-like cells in robotics. The metallic exterior of C-3PO is not equipped for sensory functions, highlighting the need for advancements in this area. Cheng’s team has pioneered a self-calibrating artificial skin made from hexagonal cells that can operate independently. This innovation promises enhanced safety features through diverse sensor capabilities, allowing robots to interact with their environment more safely and avoid causing harm to humans or themselves.
While the research is still in its infancy, initial concepts present numerous opportunities for improving human-robot interactions.
References:
[1] E R Nadel, R W Bullard, and J A Stolwijk, Importance of skin temperature in the regulation of sweating (1971), Yale University School of Medicine
[2] Marion Geerligs, Skin layer mechanics (2010), TU Eindhoven
[3] Emmanuel Dean-Leon, Florian Bergner, Karinne Ramirez-Amaro and Gordon Cheng, From Multi-modal Tactile Signals to a Compliant Control (2016), IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids)
[4] R Dahiya, E-Skin: From humanoids to humans (2019), School of Engineering University of Glasgow